1.死锁

要提交快照的时候由于没有人取走applyCh通道里面的东西,导致死锁。
具体解释:
2D的测试代码中在日志达到一定大小时会调用snapshot,该函数需要申请rf.mu这个互斥锁。而在提交普通的日志条目时,错误地没有先释放锁,导致snapshot无法进行下去,相关的进程卡在rf.mu这个锁上,无法完成快照,更无法处理applyCh通道的下一个日志条目。这导致了向通道中提交日志条目也会因为applyCh已满而被阻塞。
2.快速定位错误
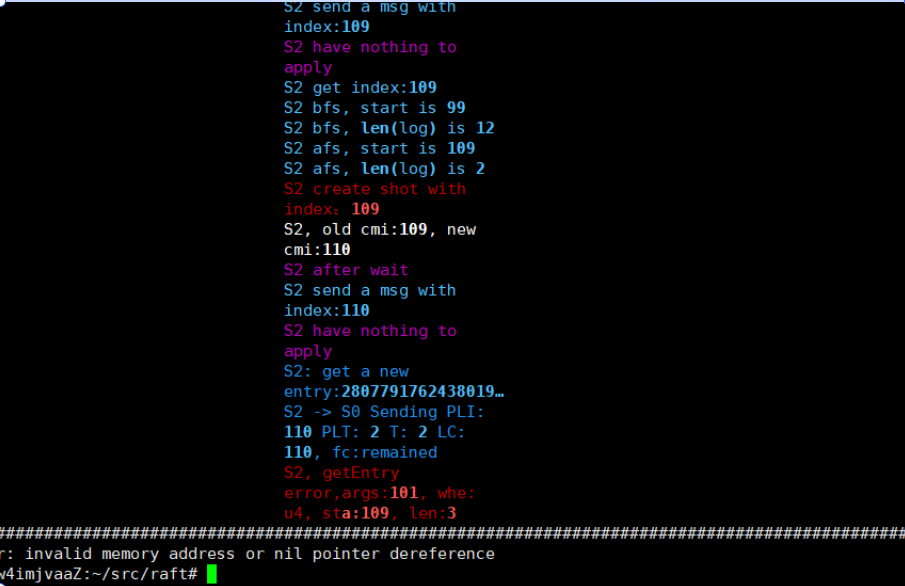
可以看到打印的日志中出现了“whe: u4″的信息,就可以推知:相关的错误发现在被u4标记的代码处,

在访问日志具体条目的代码处,传入相应的标记,这样当调用getEntry函数失败时,能快速定位目标。
3.由于截断日志增加的处理
3.1

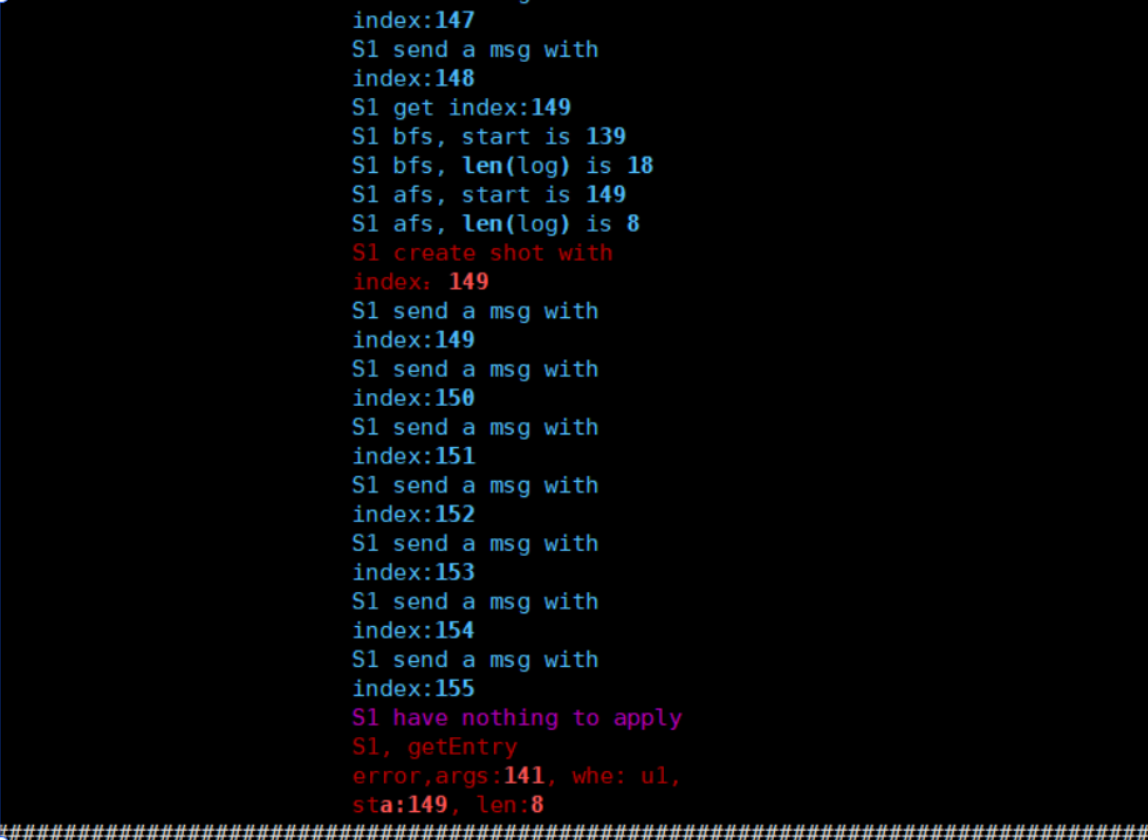
发生u4报错,定位到相应代码。
在leader方,由于prevLogIndex处的日志条目被截取,小于rf.log.start(), 在运行getEntry函数时发生报错。
解决方法:
1.设置prevLogIndex = rf.log.start()
2.应发送给follower的日志条目被删除,直接发送快照给follower。
3.2
出错的点在于follower这边:leader方发送出去的时候prevLogIndex没有低于其自身的start,故没有发送快照,但是接收方收到日志条目之后,由于已经截断了日志,并不能匹配prevLogIndex。
显然接收方对这种情况也需要处理,并不能仅仅返回个error就完事了。
解决方案:

设置XLen为start()+1, 即日志中的第一个条目,leader在收到回应的时候会执行nextIndex[i] = XLen, 这样就将nextIndex设置为follower方的日志第一个条目。
3.3

当prevLogIndex等于start时候,由于不匹配可能导致添加条目无法成功。
在截断日志的时候需要设置占位的条目的term为snapshot.term;无论是安装快照的时候,还是自己截断日志、生成快照的时候.
4关于应用(apply)时索引的思考
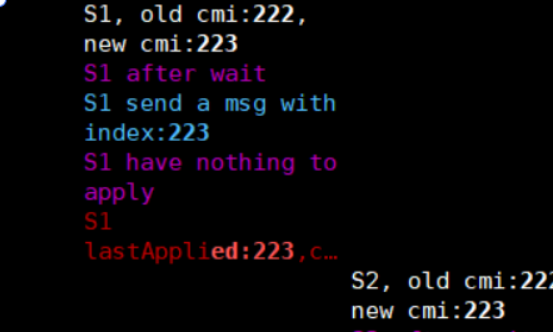
这是崩溃之前发送的消息,可以看出发送的最后一个索引号是223
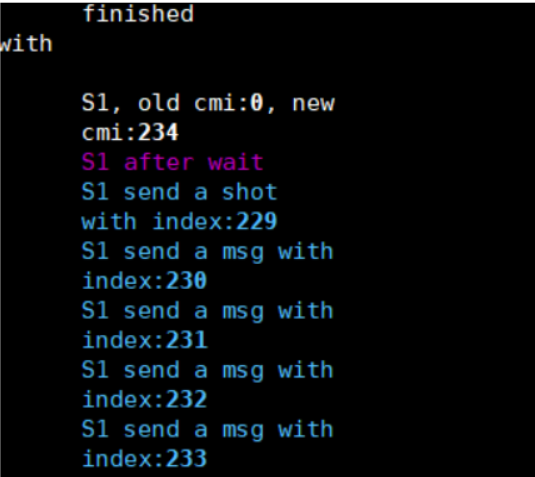
这是重启之后,接收快照后而开始apply的快照,索引为229。
显然:
当start/restart后, 如果先发送的是日志条目,索引只能从1开始;但是如果是快照的话,索引可以从任意值开始,而其后的日志条目的索引值只需从该值递增即可。
一个有趣的发现:
TestSnapshotInstallUnCrash2D 每次只会使一个server崩溃,而TestSnapshotAllCrash2D 将会使得所有server同时崩溃;前者会使得commitIndex能够维持在正确值,而不回退,而后者会使得commitIndex从0开始。
5.发现不能通过从快照中恢复的测试
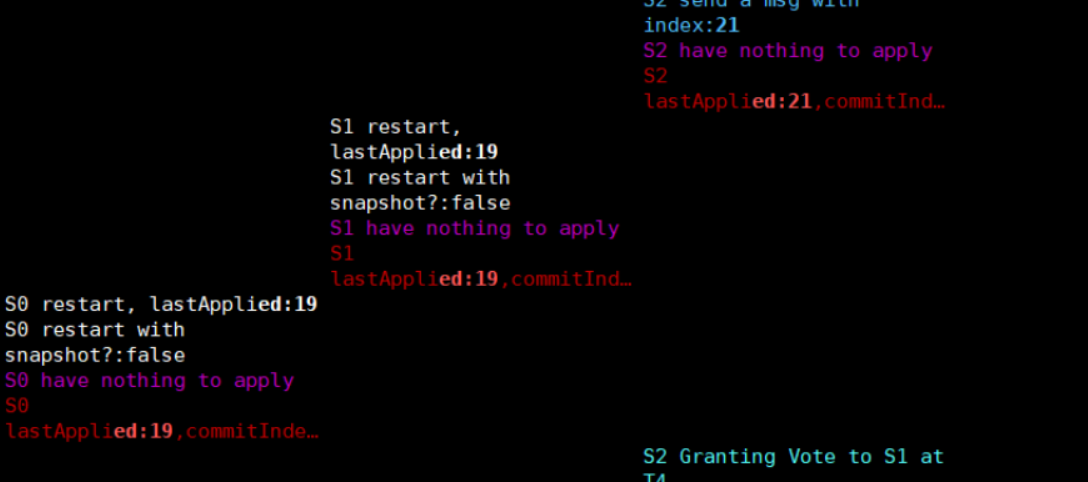
增加打印语句之后,发现restart之时都是没有带上快照的,这已经很说明问题了。
我并没有实现从稳定存储中读取快照的方法。

增添语句后,即可通过所有测试。
最终效果

整个实验2大致需要花费364秒左右,还是很满意的。